Hi folks,
I haven't updated in a while, so I thought I would post some of the latest pictures and info.
I have changed the rover setup somewhat from the original plan. Originally, I was going to use an onboard generator, to power a 120V power circuit, since I had lots of 120V powered hardware.
I have modified that a bit. I added two, 12V batteries in series for 24V. I also added a 24V inverter to power the onboard electronics, along with a battery tender charger, that is designed to be left in the circuit all of the time. This allows independant, "quiet" running off of batteries, and still retain the ability to charge off a generator for long term field use.
I have several power supplies running for 12V, 5V, and low power 24V (isolated from batteries), on the 120V power circuit. Without much of a load, the power supplies only pull 32VA on the power circuit, or 0.28A. The inverter can supply up to 600W so I should have plenty of room.
I am using a puresine type inverter, to give me the cleanest AC power I can get. I had a modified sine wave type earlier, and one of my power supplies was wining about it, so I changed over to the true sine wave. No more wining from the power supplies.
I also have the SoftPLC with the Codesys running on my base board installed. I am driving the Sabertooth 2X25 motor drive board from 2 of the DAC outputs on the baseboard. This seems to work really well. The base board is running the Adafruit 10DOF IMU, which gives me pitch, roll, and yaw, with Heading. I also have temp and barometric pressure with altitude from this as well.
I have a Pi camera embedded in the control GUI, to steer by, if needed. I have also upgraded the Wifi Router to an uptodate TPLink AC1750 Dual Band Gigabit router. This gives me plenty of range, and bandwidth for streaming video and control.
I still have to install my main power on/off circuit, and my ESTOP circuit before I can run on the ground.
Still to do is adding the ROS computer. I had originally planned on the Zotac HTPC, but I will be changing over to an Intel NUC or equivalent, and run ROS from that. The plan is to bring in ROS-specific sensors such as the Kinect, and run a Modbus server, to pass data from the SoftPLC based Pi.
I still have to build the detector array, as well as the Main Operator Console which I havent started on yet. I could use a laptop for this, and run everything from the broswer GUI, but I really like actual hardware. I had planned on using another Pi with the 7" touchscreen display, running another SoftPLC and Codesys - using the Pi hardware, and perhaps another base board for this. However, I would use the laptop with Windows 10 and run another gui with a SQL database historian from it. I can run a USB server on the ROS machine, and have access to Phidgets and other USB based hardware in the rover from the Windows machine. This would allow me to use my Phidget GPS and other boards I bought.
I guess that's it, I'll post more later. :)
Below are some pictures of the various hardware, and a screenshot of a basic rover motor control GUI.
 |
| Screenshot of Motor Control GUI |
 |
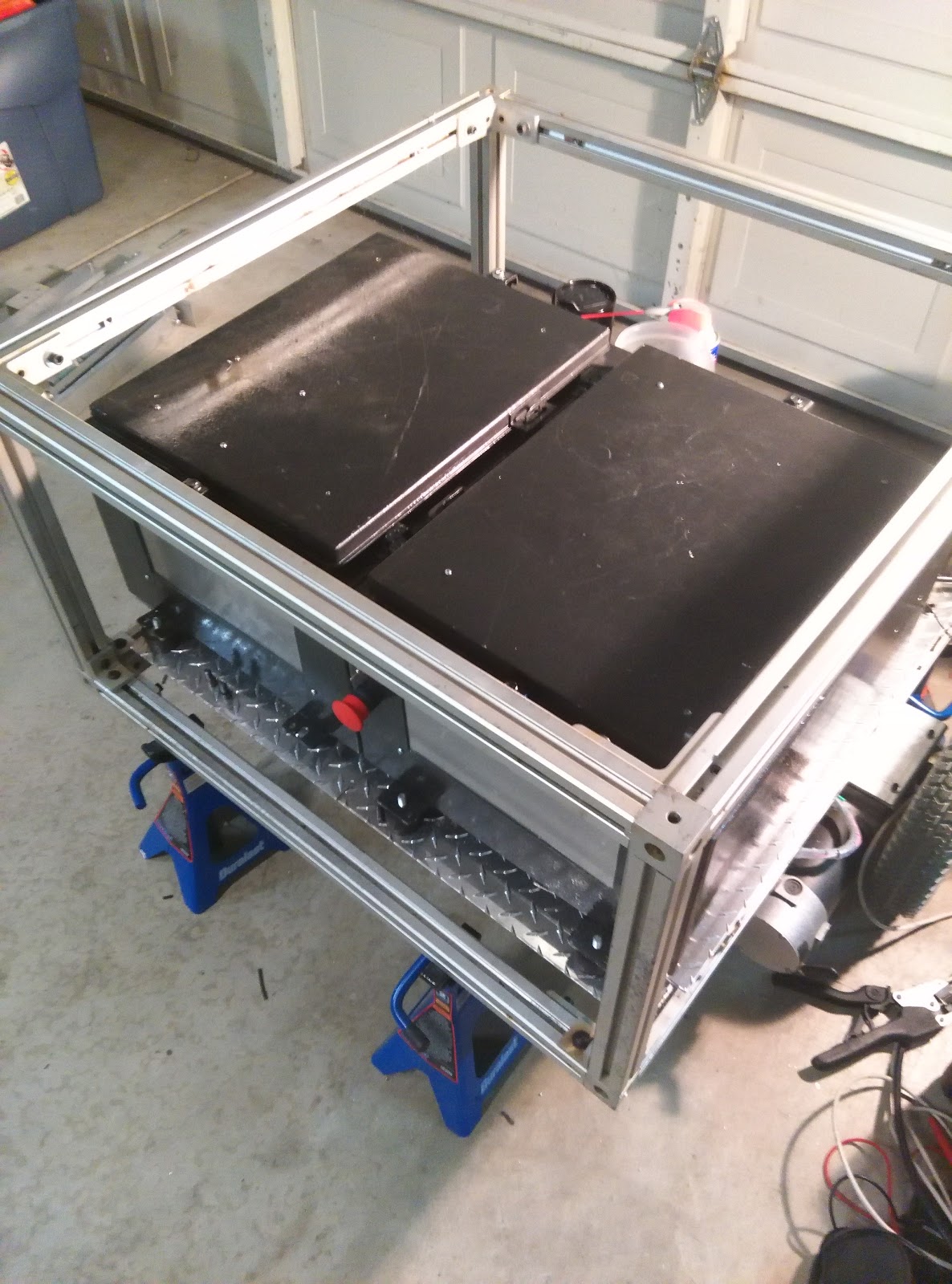
| Right side view of Rover with lids open |
 |
| Left control bay showing batteries, inverter, and charger. |
 |
| Left bay again |
 |
| SoftPLC running Codesys on the Pi and baseboard with Sabertooth 2x25 and Wifi router |